続々・ベクトルの回転
自分でもこの記事の結果が何を意味するのか,よくわかっていないのですが, 面白い結果がでたので,ここに記します. おそらくリー群,リー代数を学んでいる人には, 当然の結果なのだと思います. 前の記事は, 続ベクトルの回転 です. 次の記事は, 続々々ベクトルの回転 です.
ベクトルの回転の行列表現
これから, 続ベクトルの回転 で出た回転の行列を別の方法で導く方法を見つけたので, 書いていきます.
大元の式は, ベクトルの回転 の式  であり,再び書いておきます.回転の回転軸
であり,再び書いておきます.回転の回転軸  (ただし
(ただし  )と置くと
)と置くと
![\bm{r}^\prime = (\bm{n} \cdot \bm{r}) \bm{n} + [\bm{r}-(\bm{n} \cdot \bm{r})\bm{n}]\cos \phi +(\bm{n} \times \bm{r})\sin \phi \tag{1}](./d78477fc65be68dceb7e1666ffb7f36f.png)
です. 続ベクトルの回転 で導いたのは,,
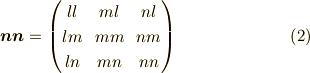
となり,次に,
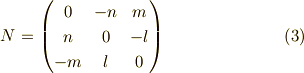
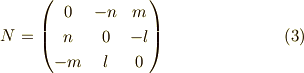
と置くと,

となって,
この両者の間には,  を単位行列として,
を単位行列として,

となることでした.よって,式 は,最終的に次の形になります.
![\bm{r}^\prime &= [I + N^2 + (-\cos \phi N^2+\sin \phi N)]\bm{r} \\ &= [\bm{n}\bm{n} + (-\cos \phi N^2+\sin \phi N)]\bm{r} \tag{6}](./eaf417dbcec719adbe63567f9f633ae0.png)
行列の指数関数
行列  の指数関数
の指数関数  は,次のように定義されます.これは,齊藤正彦先生の「線型代数入門」
(東京大学出版会,ISBN4-13-062001-0)などを読んでいただけたらいいと思います.
は,次のように定義されます.これは,齊藤正彦先生の「線型代数入門」
(東京大学出版会,ISBN4-13-062001-0)などを読んでいただけたらいいと思います.

これを,どう使うかというと, に  の
の  に実数パラメータ
に実数パラメータ  を掛けたものを代入するのです.
を掛けたものを代入するのです.
つまり,

を計算するのです.
ここで,  に成り立つ次の性質を利用します.
に成り立つ次の性質を利用します.



では,さっそく式  の続きを計算してみましょう.
の続きを計算してみましょう.
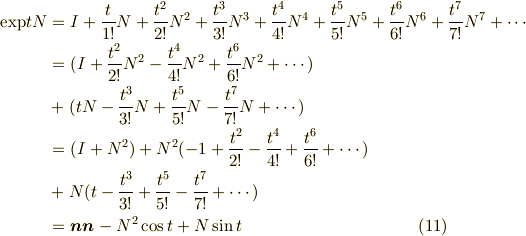
となります.上の式では,サインとコサインのテイラー展開を用いました.結果,見事に式  の演算子部分が再現されました.
の演算子部分が再現されました.
用語の整理
今回の話のキーワードは,リー群の中の「回転群」SO(3) です.
リー代数とは,行列 のことです.
リー群とは,  の事です.
リー代数 は,リー群の元 を生成する演算子となっています.
の事です.
リー代数 は,リー群の元 を生成する演算子となっています.
これからリー群について勉強しようとする人は下に挙げる参考文献を推薦しますので,ぜひ読んでみてください.