独楽(コマ)を傾ける事に関する考察
この記事では,独楽(コマ)を傾ける力を加えると, 独楽がどう振る舞うか,について書きます.
考える独楽の説明
図の様なx軸,y軸,z軸方向にパイプを持ち,
x,y方向の端には原点から  の所に質量
の所に質量  の質点が付けられている,
回転体を考えます.この質点に1,2,3,4と名前を付けます.
の質点が付けられている,
回転体を考えます.この質点に1,2,3,4と名前を付けます.
角速度  で回転軸をz方向にして回転している時,
質点の座標をそれぞれ
で回転軸をz方向にして回転している時,
質点の座標をそれぞれ 


 とすると,行ベクトル(
とすると,行ベクトル(  は転置の意味)を用いて,
は転置の意味)を用いて,




となります.以降では,質点3,4は,1,2と原点対称なので, 計算を省略します.
傾ける力を加える
ここで,z軸の正の側を手で持ち,x軸の負の方向へ倒す力を加えます. 偶力にする為,同時にz軸の負の側を持ち,x軸の正の方向へ力を加えます. すると運動方程式は,おおざっぱに見積もって,時間が十分に小さいとき,


となります.これは,独楽は回転していますが,
z軸の両端を実験室系のx軸方向に力を掛け続けることを表しています.
また,支点である原点から,y軸の方向から見て原点から離れる程,
大きな力がかかると思われます.というのは,慣性モーメントを  とすると,
傾き角度の方向の運動方程式が,
とすると,
傾き角度の方向の運動方程式が,

であるから,

という力関係が存在するのに対し,例えば質点1にかかる力  は個々の質点にかかるモーメントを考えると,
は個々の質点にかかるモーメントを考えると,

つまり,

となることから,妥当だと思われます.
これからしたいことは,この式を時間  で積分することです.初期速度を求める為,
式
で積分することです.初期速度を求める為,
式  ,
,  を時間で微分して
を時間で微分して  と置いたもの
を
と置いたもの
を  ,
,  とすると,
とすると,


また,初期位置は式 , で と置いたものなので,
それぞれ  ,
,  と置くと,
と置くと,


です.
式  ,
,  を時間
を時間  から
から  まで定積分してやると,
まで定積分してやると,
さらに定積分して,
質点2についても同様に計算すると,
さらに定積分をして,
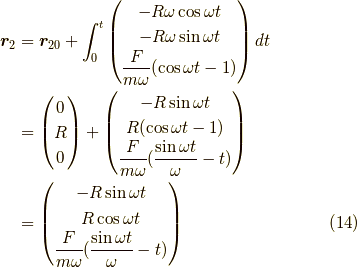
以上をまとめると,
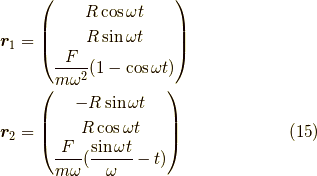
となります.
動きの解析
ここで,  ,
,  の作る平面に垂直なベクトルを考えます.
つまり,回転軸がどう振る舞うかを考えるのです.
それには,外積を使えば求められますね.
その値は,z軸の正の方向を向いたものを計算すると,
の作る平面に垂直なベクトルを考えます.
つまり,回転軸がどう振る舞うかを考えるのです.
それには,外積を使えば求められますね.
その値は,z軸の正の方向を向いたものを計算すると,
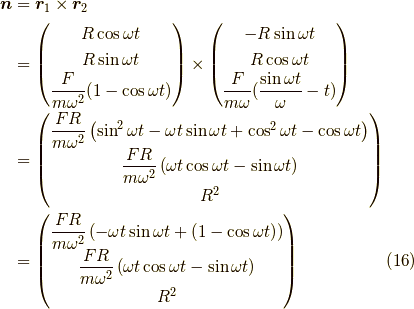
ここで高次の項を無視すると,  は,
は,  と置くと,
と置くと,
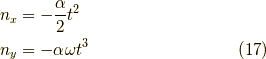
より,

となります.式  より,
より,  ですから,
ですから,
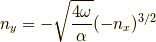
よって,独楽はまず,  軸の負の方向へ傾くことが分かります.
これだけでは,よく分からないので,Excelを使って式
軸の負の方向へ傾くことが分かります.
これだけでは,よく分からないので,Excelを使って式  のx,y成分
(つまりは,上から見た時,軸が描く軌跡)
をプロットしてみます.
のx,y成分
(つまりは,上から見た時,軸が描く軌跡)
をプロットしてみます.
まずは,  (下図)です.
(下図)です.
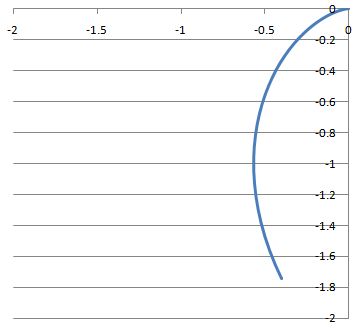
次に,  (下図)です.
(下図)です.
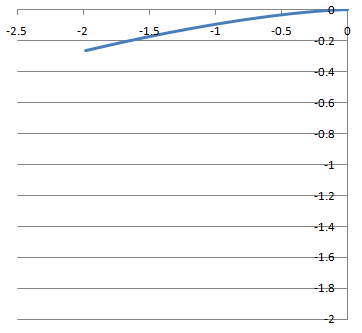
最後に,  (下図,これだけ10倍に拡大)です.
(下図,これだけ10倍に拡大)です.
回転体に加えた力は90度位相が遅れる(今回の場合,y軸の負の方向に  が傾く)とよく言われます [*] が,
実際のところは,ごく微視的にみれば,最初は傾けた方向に傾くようです.
が傾く)とよく言われます [*] が,
実際のところは,ごく微視的にみれば,最初は傾けた方向に傾くようです.
| [*] | その効果のことをジャイロプリセッション効果と言うらしいです. |
回転がゆっくりならば,独楽はその方向に倒れますし, 回転が速いと,回転軸はラセンを描いてぶれの幅を徐々に大きくしていくようです. この結果は,直観的に正しいと思われます.
今日はこの辺で.お疲れ様でした.