色々な物体の慣性モーメント1
色々な形の物体の,重心回りの慣性モーメントを一覧表にまとめてみました.物体の質量はどれも  とします.図中に書き込まれた座標の原点は,物体の重心にあると思ってください.
とします.図中に書き込まれた座標の原点は,物体の重心にあると思ってください.
一覧表
| 慣性モーメント | 図 | |
|---|---|---|
長さ  の細い棒 の細い棒 |
||
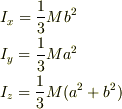
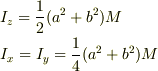
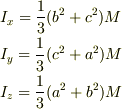
辺の長さが  の長方形 の長方形 |
||
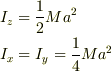
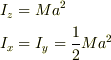
半径  の薄円板 の薄円板 |
||
| 半径 の細い円輪 |
||
外半径 ,内半径  の中空円板 の中空円板 |
||
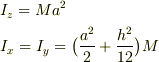
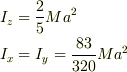
| 半径 の球 |
||
| 半径 の薄い球殻 |
||
| 外半径 ,内半径 の球殻 |
||
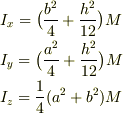
辺の長さが  の直方体 の直方体 |
||
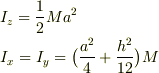
半径 ,高さ  の円柱 の円柱 |
||
| 半径 ,高さ の薄い中空円柱 |
||
| 半径 の半球 |
||
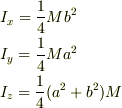
両軸が ,  の楕円形薄板 の楕円形薄板 |
||
| 両軸が , の楕円を底面とする高さ の楕円柱 |
||
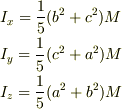
三軸が , ,  の楕円体 の楕円体 |
||
| 半径 の円を底面とし高さ の円錐 |
||
中心半径 , 管半径  のトーラス のトーラス |